Project for Design Using C++ (COMS6998E) & A2R Lab
Indy7 SDK is a ROS2 package for Neuromeka's Indy7 manipulator.
Key features include:
- High-frequency communication buffering between model predictive controller and robot interface.
- Allows controller and robot to run at different frequencies.
- Integration with the A2R Lab's research stack for GPU-accelerated nonlinear MPC.
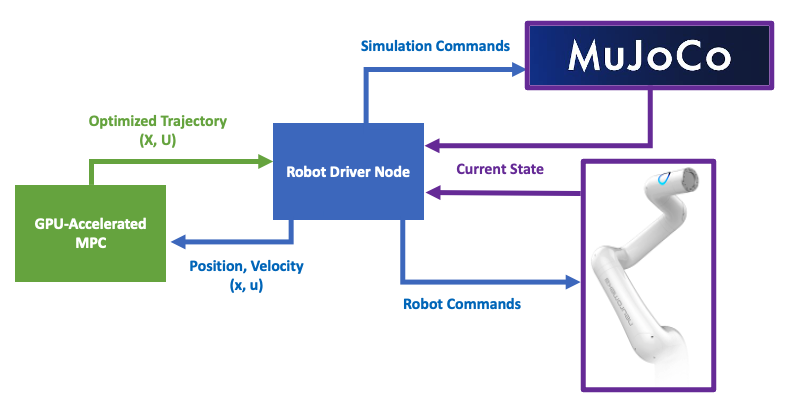
Overview of software architecture and communication flow.