GATO
GPU-Accelerated and Batched Trajectory Optimization for Scalable Edge Model Predictive Control
Research @ A2R Lab, Columbia University
Authors: Alexander Du, Emre Adabag, Gabriel Bravo, Brian Plancher

While Model Predictive Control (MPC) delivers strong performance across robotics applications, solving the underlying (batches of) nonlinear trajectory optimization (TO) problems online remains computationally demanding. Existing GPU-accelerated approaches often fail to bridge the gap between single-solve real-time performance and large-scale (non-real-time) batch throughput, or they rely on restricted model generalities.
We present GATO, an open-source, GPU-accelerated, batched TO solver co-designed across algorithm, software, and computational hardware to deliver real-time throughput for moderate batch size regimes (tens to low-hundreds). Our approach leverages a combination of block-, warp-, and thread-level parallelism within and across solves for ultra-high performance.
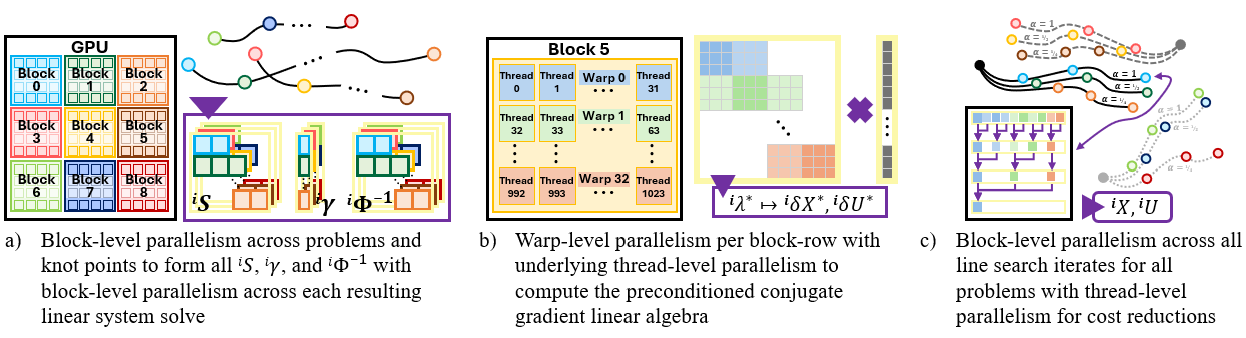
Architecture & Design
GATO is designed to solve tens to low-hundreds of problems simultaneously. This is achieved via hierarchical parallelism both across and within underlying computations for efficient problem matrix formation, linear system solves, and line search iterate computations.
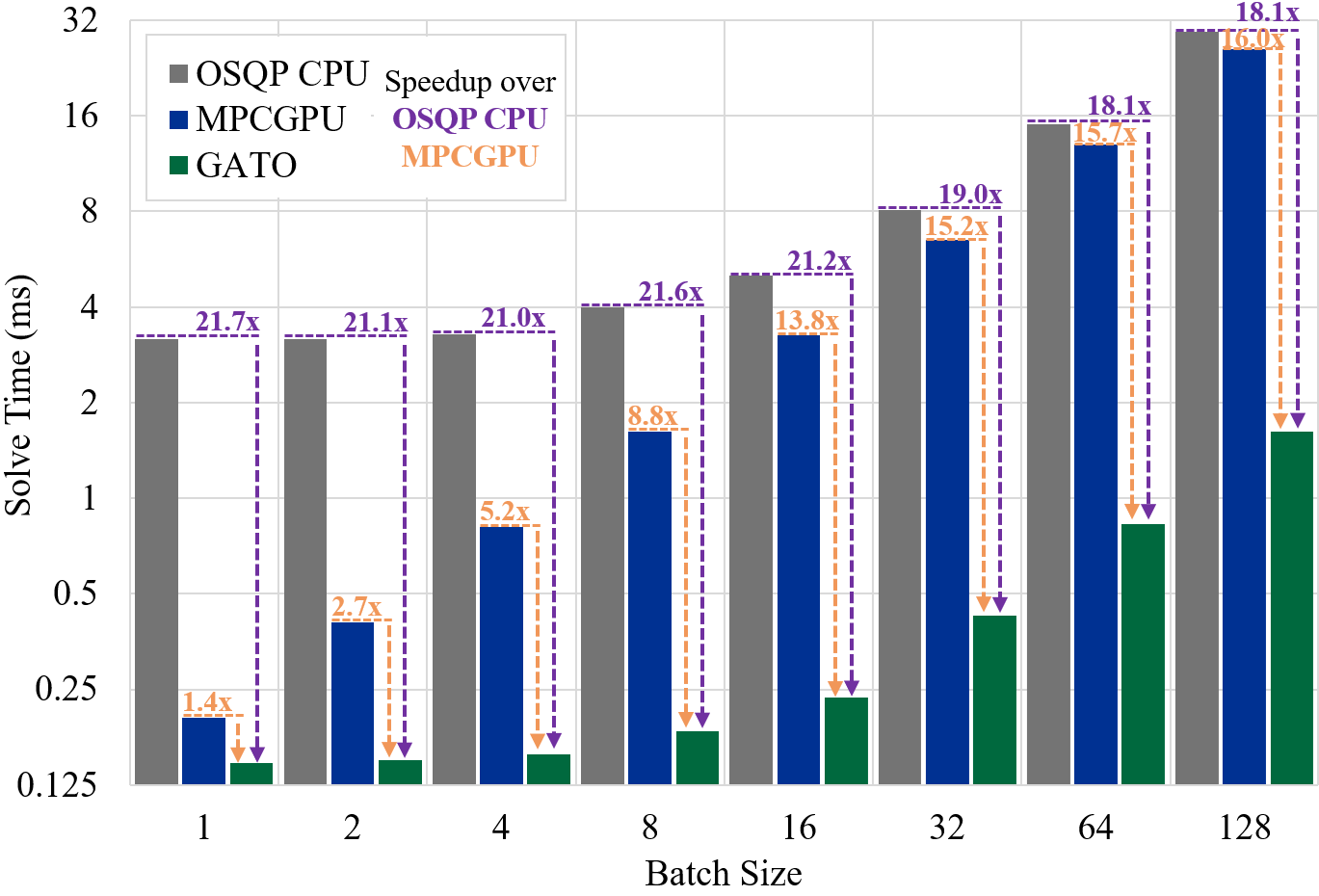
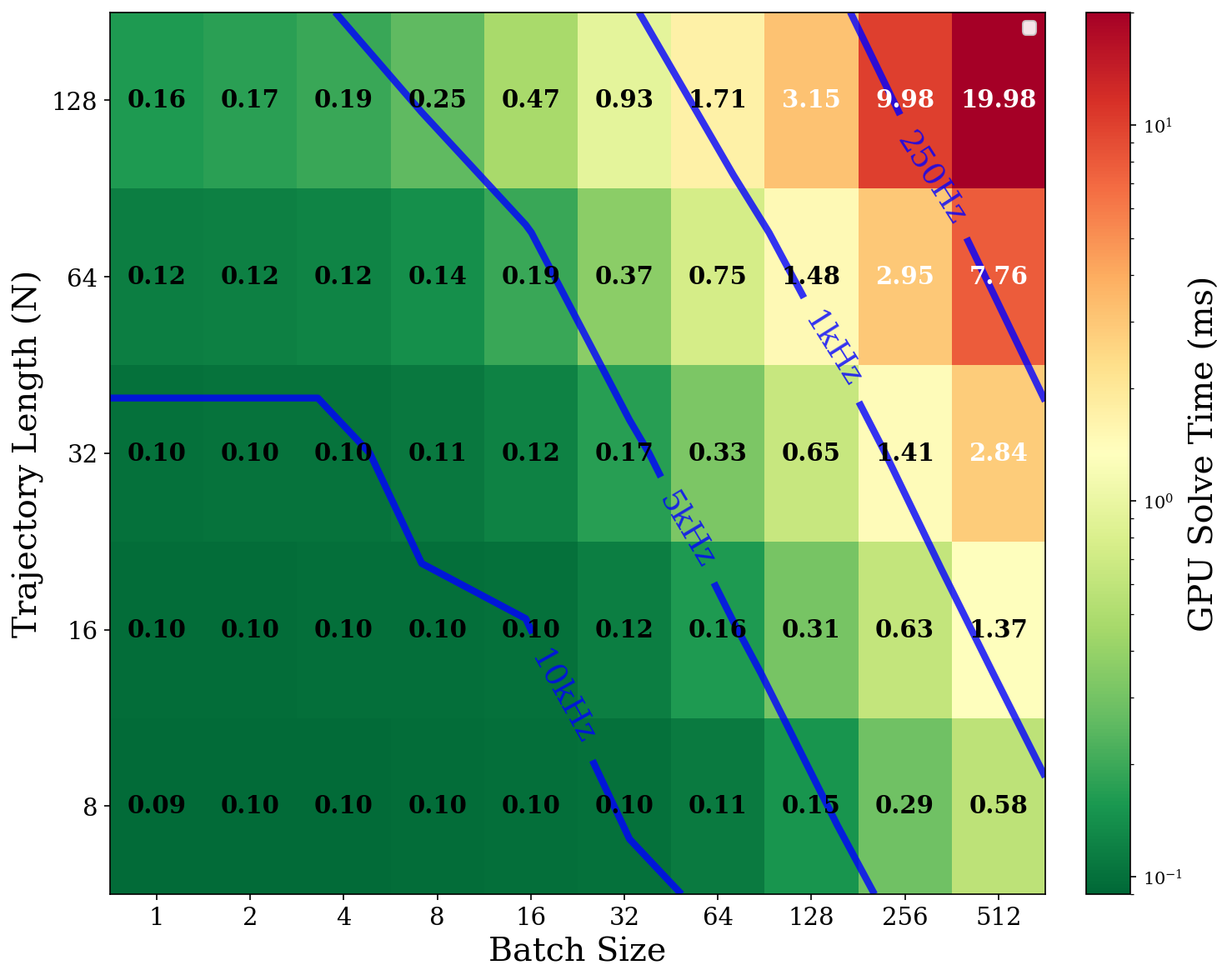
Performance
We demonstrate the effectiveness of our approach through simulated benchmarks showing speedups of 18-21× over CPU baselines and 1.4-16× over GPU baselines as batch size increases.
Case Studies
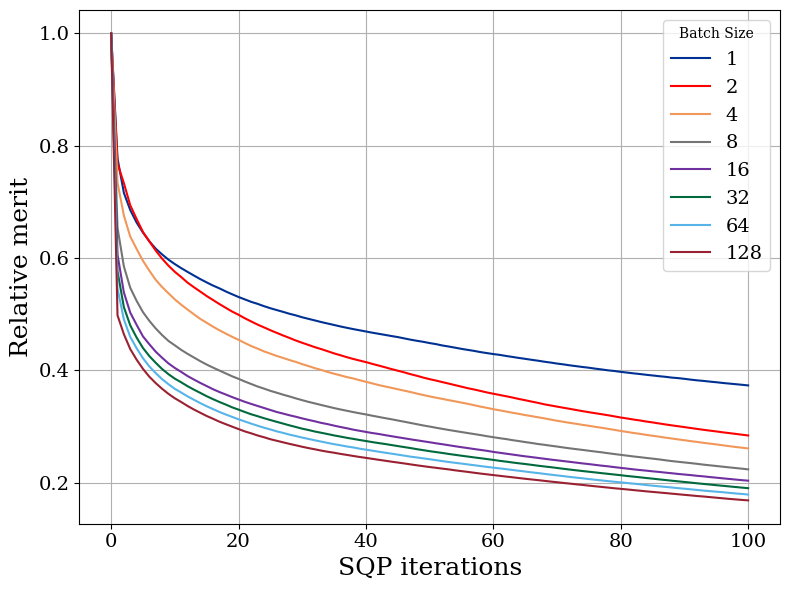
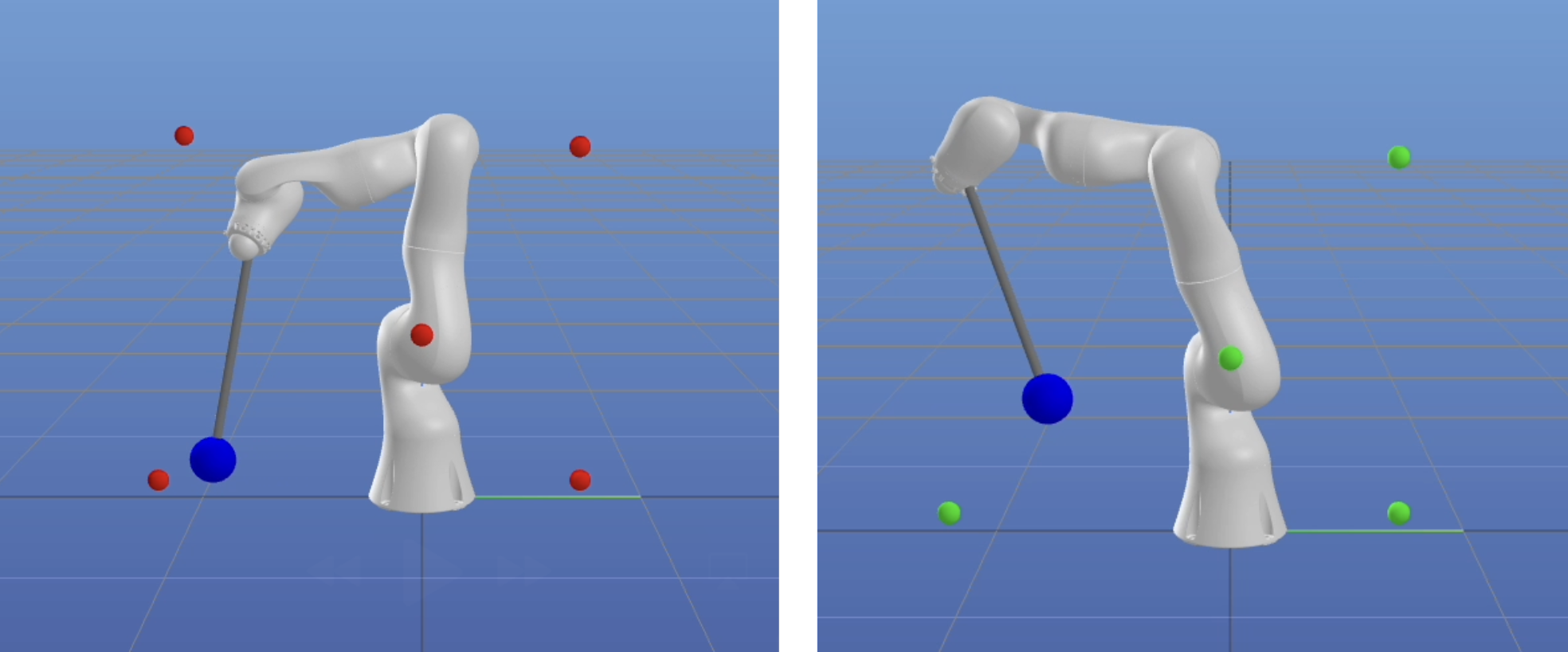
We highlight the benefits of real-time batched optimization through case studies demonstrating improved disturbance rejection and convergence behavior.

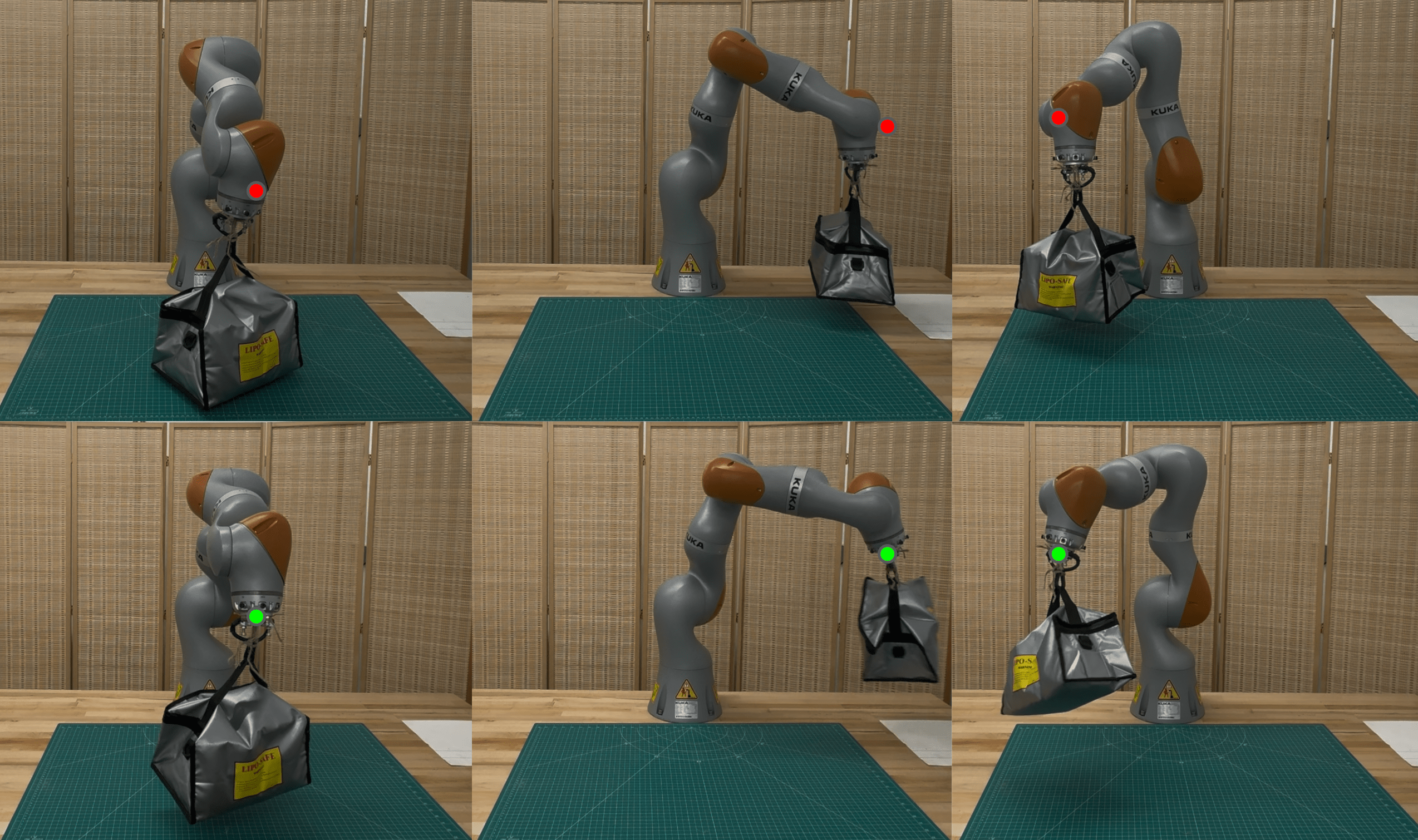
Hardware Validation
The solver was validated on hardware using an industrial manipulator, demonstrating real-time capability and robustness.