FPGA-MPC
FPGA-Accelerated ADMM Solver for Convex Model Predictive Control
Embedded Systems Design (CSEE 4840) @ Columbia University
Team: Alexander Du, Apurva Reddy, Roy Hwang, Godwill Agbehonou
FPGA-MPC is a hardware-accelerated solver for Model Predictive Control (MPC) implemented on an Intel Cyclone V FPGA (DE1-SoC). The project accelerates the Alternating Direction Method of Multipliers (ADMM) algorithm, inspired by TinyMPC, to solve trajectory optimization problems in real-time.
The system features a custom SystemVerilog implementation of the ADMM solver using fixed-point arithmetic, a Linux device driver for memory-mapped communication, and a Python-based UDP simulator for validating the control logic with a simulated Crazyflie quadrotor.
System Architecture
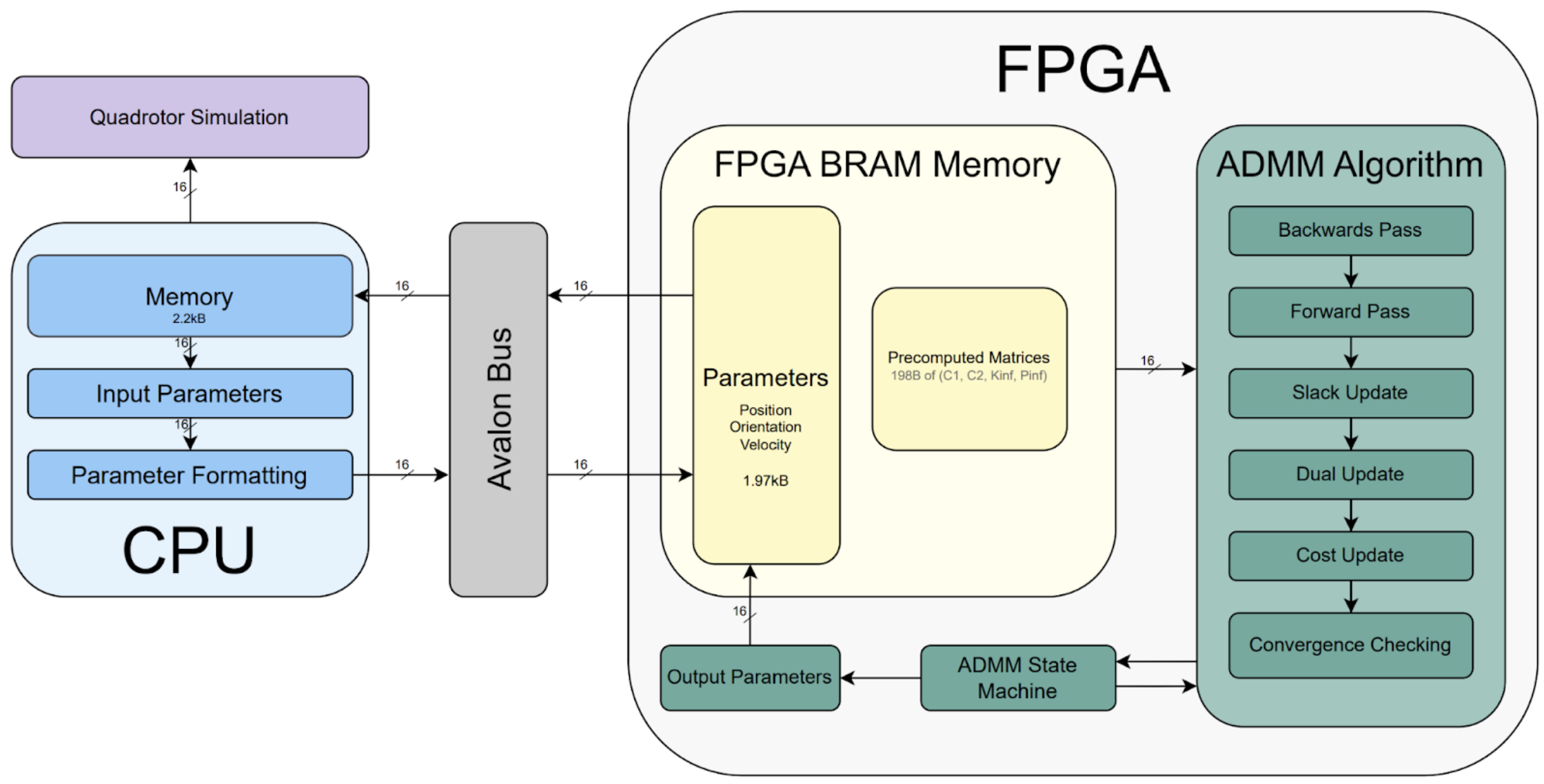
Dataflow diagram showing the interaction between the Quadrotor Simulator, HPS (CPU), and FPGA Fabric.
Technical Implementation
Hardware (SystemVerilog)
- Fixed-point arithmetic implementation of ADMM
- Custom memory interface via Avalon Bus
- Parallelized primal, slack, and dual updates
- Pipelined residual calculation
Software (C/Linux)
- Memory-mapped interface driver
- Linux userspace application for solver control
- Network interface for external simulation
Simulation (Python)
- UDP-based quadrotor simulator
- Real-time visualization of trajectory tracking
- Integration with hardware-in-the-loop setup